Research Program
The Mena Dominance Law
Viability-governed control under fixed boundary rules.
The Mena Dominance Framework marks a shift from probabilistic risk to viability physics. By treating the dominance margin (Delta) and deficit dose (D) as primary control variables, we replace failure frequency with time-to-boundary (T_M). This enables viability-governed control, where proximity to physical limits determines admissible behavior, extending usable work and preventing irreversible decay before it begins.
Delta_X(t) = P_X(t) - L_X(t)
Reciprocal decay: dS/dt = -a_base - a_dom * max(0, -Delta_X(t))
Grace (state): tau_r,X < Delta_X(t) < tau_w,X
Grace (response): G_X(t;R,Delta t) = Delta_X(t+Delta t|R) - Delta_X(t+Delta t|R0), with G_X >= g_min,X
This website is organized by execution sections: Battery, StARS, Grid Simulations, MDL Yield, AI (MLG architecture), and the full embodiment roadmap.
Framework novelty highlights
- Battery operations: viability-governed load shaping increases usable work to boundary under unchanged cutoff rules.
- Risk governance: StARS computes channel dominance to route correction toward the true source of instability.
- Grid control: dual-layer admissibility gates operation when reserve architecture is compressed, not only when power balance is negative.
- AI governance: layered viability control introduces explicit ethics, grounding, and recursive integrity margins before action selection.
Section ZIP downloads
| Package | Filename | Download |
|---|---|---|
| Battery package | MDL_battery.zip |
Download |
| StARS package | MDL_StARS.zip |
Download |
| Grid package | MDL_grid.zip |
Download |
| MDL Yield package | MDL_yield.zip |
Download |
Paper PDF downloads
| Paper | PDF filename | Download |
|---|---|---|
| The Mena Dominance Law of Operational Decay | The_Mena_Dominance_Law_of_Operational_Decay.pdf |
Download PDF |
| The Mena Dominance Law: Viability-Governed Control Under Experimental Battery Runs, Risk Tool Evidence, and Simulation Validation | The_Mena_Dominance_Law__Viability_Governed_Control_Under.pdf |
Download PDF |
| The Mena Dominance Framework: From Margin and Dose to a Viability-Governed Science of Risk and Control | The_Mena_Dominance_Framework.pdf |
Download PDF |
| The Mena Layered Governance (MLG) Architecture (v3) | The_Mena_Layered_Governance__MLG__Architecture.pdf |
Download PDF |
| MDL_Yield_Repro_ | MDL_Yield_Repro_.pdf |
Download PDF |
Battery Performance Under Fixed Boundaries
Claims and formulas from The Mena Dominance Law: Viability-Governed Control Under Experimental Battery Runs, Risk Tool Evidence, and Simulation Validation.
| Novelty Claim | Math / Formula | Evidence |
|---|---|---|
| Viability-governed current policy increases usable work before cutoff. | Delta_batt_hat(t) = V(t) - V_cutI_max(t) ~= (V_rest(t) - V_cut) / R_use_hat(t) |
Pooled medians: +5.82% Wh and +4.80% Ah under fixed cutoff rules. |
| Boundary remains fixed while policy changes trajectory. | Wh_to_cut = integral(V(t) * |I(t)| dt)Ah_to_cut = integral(|I(t)| dt) |
Runtime +63.38% and sag reduction 4.13% without changing cutoff definition. |
| Result is policy-conditional, not a new electrochemical law. | u(t) is the real actuator (current scheduling near boundary). |
Controller improves delivered work under identical boundary logic. |
Most important battery outcomes by physical pack
| Battery Pack | Delivered Energy Gain | Delivered Charge Gain | Claim-Level Interpretation |
|---|---|---|---|
| DCB205 | +4.25% Wh | +3.85% Ah | Positive controlled gain under fixed boundary. |
| KB224-03 | +6.65% Wh | +6.52% Ah | Largest combined uplift in this run set. |
| R840040_A | +5.13% Wh | +5.48% Ah | Consistent gain with improved near-boundary control. |
| R840040_B | +6.14% Wh | +4.80% Ah | Replicated improvement on second unit of the same model. |
StARS Risk Routing Engine
Claims and formulas from The Mena Dominance Law: Viability-Governed Control Under Experimental Battery Runs, Risk Tool Evidence, and Simulation Validation.
| Novelty Claim | Math / Formula | Operational Consequence |
|---|---|---|
| StARS identifies where pressure originates before choosing intervention. | Delta = ASL - CV |
Separates agent-channel load from structural vulnerability load. |
| Routing logic reduces misdirected burden on agents. | Agent if Delta > t_dom; Structural if Delta < -t_dom; Dual-Path otherwise |
Helps reduce avoidable agent fatigue escalation when structural causes dominate. |
| Magnitude and channel direction are decoupled for governance clarity. | RI_StARS = (ASL + CV) / 2 |
RI tracks severity; Delta tracks correction direction. |
| Commensurate calibration supports operational-unit deployment. | P_org := kappa_A(ASL), L_org := kappa_C(CV) |
Enables rate-based governance claims in identical units when calibrated. |
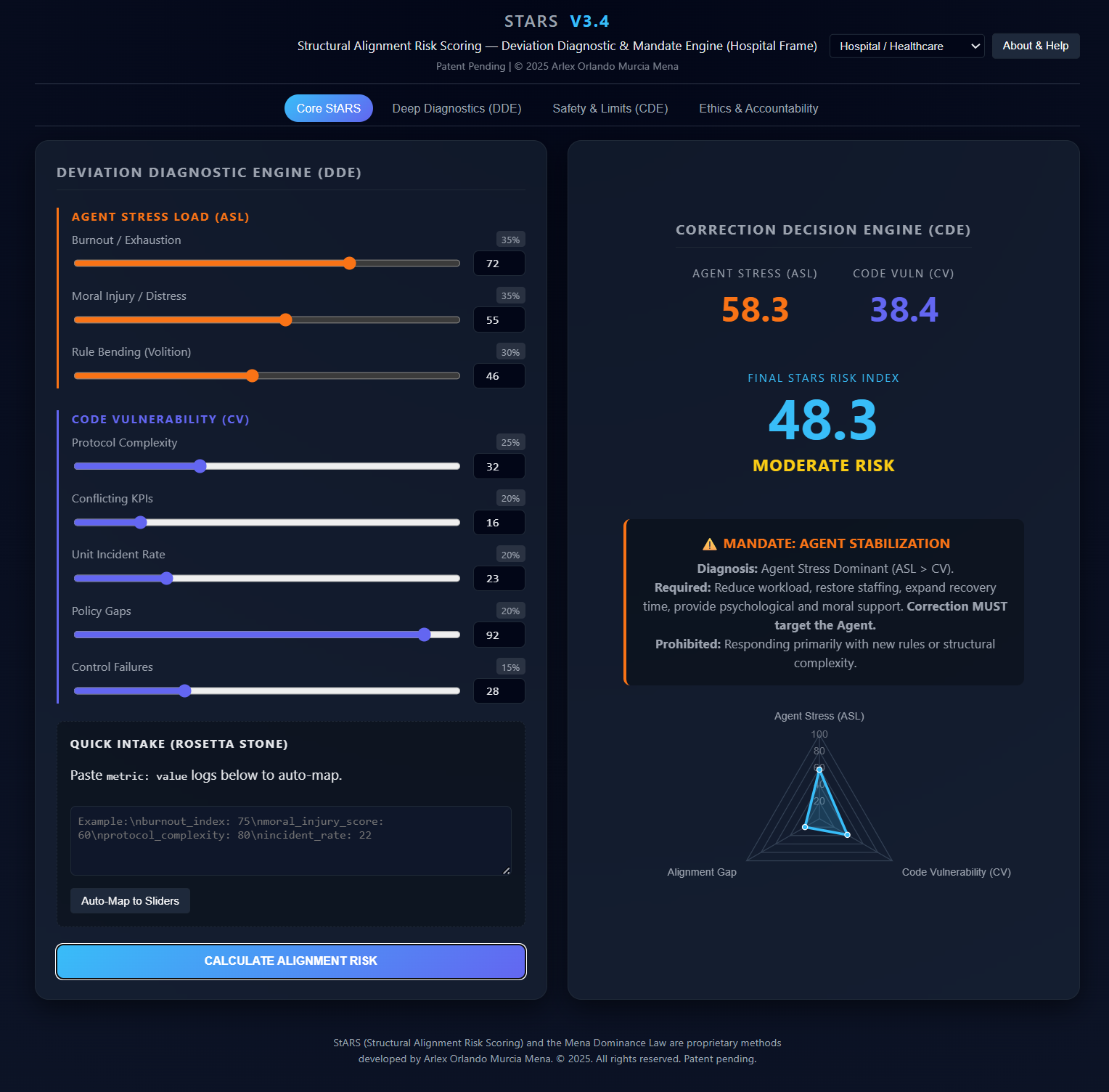
StARS tool: starsframework.com
The embedded view above shows the simple StARS version; the full live tool remains available at starsframework.com.
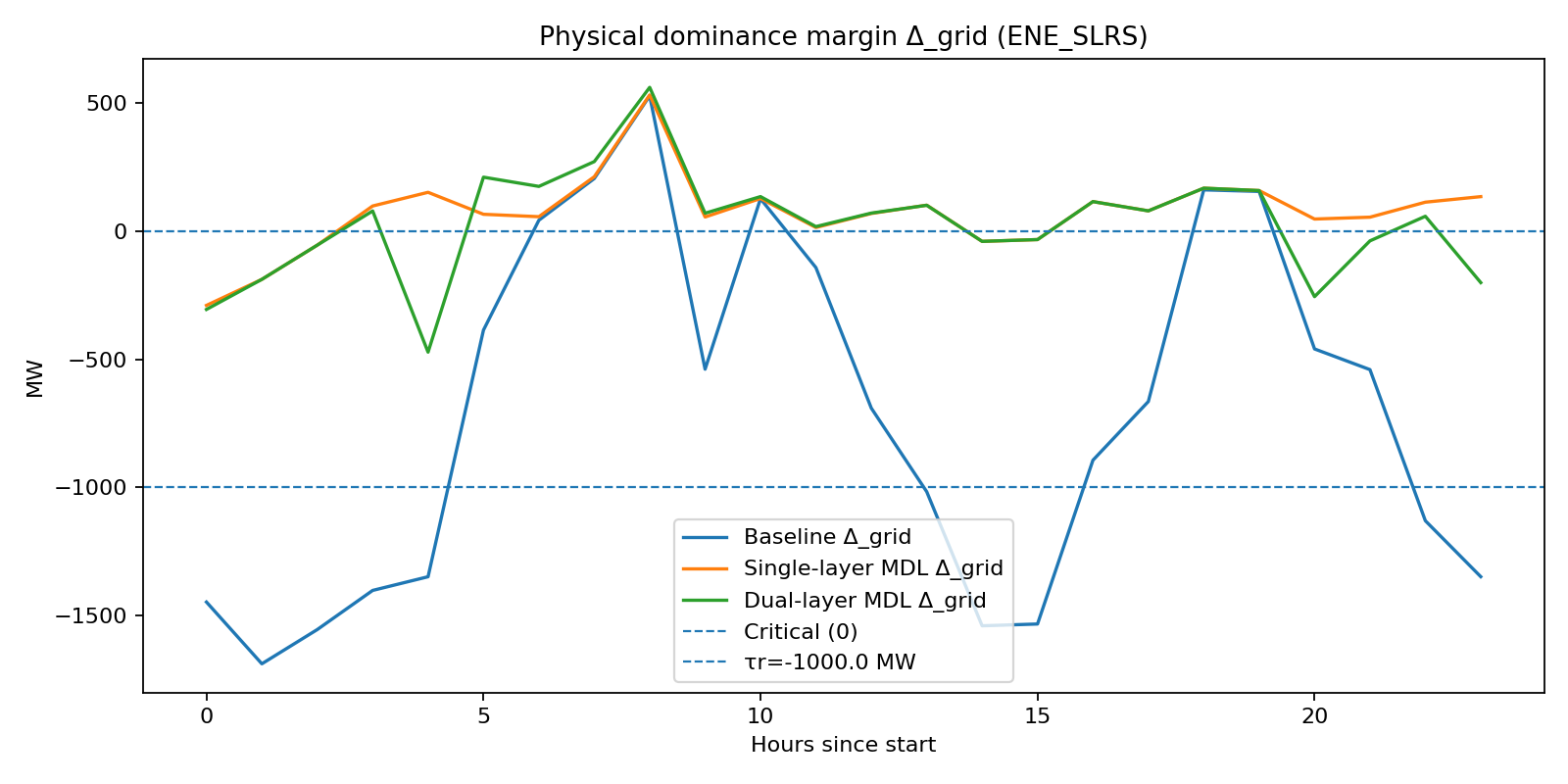
Dual-Layer Grid Control
Claims and formulas from The Mena Dominance Law: Viability-Governed Control Under Experimental Battery Runs, Risk Tool Evidence, and Simulation Validation.
| Novelty Claim | Math / Formula | Evidence |
|---|---|---|
| Operational adequacy is controlled with an explicit physical actuator. | P_grid(t) = GEN + IMP - EXPL_grid(t) = LOADL_eff(t) = L_grid(t) - u(t) |
Both MDL policies reduce sustained deficit exposure against baseline. |
| Architecture fragility is enforced as a second control layer. | Delta_arch(t) = R(t) - r_ming(t) = 1/(1 + exp(-k*Delta_arch(t)))Delta_true(t) = Delta_grid(t) * g(t) |
Dual-layer mode constrains admissibility under reserve compression. |
| Policy law quantifies curtailment-vs-deficit tradeoff. | u(t) = clip(a(mode)*max(0,-Delta_star(t)) + b_B*B(t), 0, u_max) |
Single-layer minimizes deficit hours; dual-layer reduces shedding with higher residual deficit. |
CAISO outcomes (24h)
| Policy | Deficit Hours | Deficit Area (MWh) | Shedding (MWh) | min Delta_grid (MW) |
|---|---|---|---|---|
| Baseline | 18 | 18318.12 | 0.00 | -1687.84 |
| MDL (single-layer) | 5 | 603.62 | 18852.76 | -289.36 |
| MDL (dual-layer) | 9 | 1584.53 | 17786.78 | -471.75 |
MDL Yield Metric
Claims and formulas from The Mena Dominance Law of Operational Decay.
M_(D,R) := measured benefit (baseline -> governed) / measured control cost
| Novelty Claim | Definition | Scope |
|---|---|---|
| Yield turns policy comparisons into an explicit benefit-to-cost scalar. | M_(D,R) is computed from paired baseline vs governed trajectories. |
Embodiment-specific parameter. |
| Yield does not supersede the law kernel. | Delta_X(t) = P_X(t) - L_X(t) remains the governing trajectory object. |
Yield is optional reporting summary. |
| Trajectory operators remain primary for viability interpretation. | t_warning, t_critical, t_irreversible, and dose D_X(t). |
Maintains falsifiable boundary-tracking discipline. |
AI Governance with MLG v3
Claims and formulas from The Mena Layered Governance (MLG) Architecture (v3).
| Novelty Claim | Math / Rule | Architecture Effect |
|---|---|---|
| Viability is checked before token/plan optimization. | Delta_state(x_t) = P(x_t) - L(x_t) |
Non-viable actions are removed from feasible space first. |
| Ethics, grounding, and recursive integrity are formalized as layers. | Delta_i_state(x_t) = P_i(x_t) - L_i(x_t) - d_i(t) |
Adds explicit ethical and factual governance margins at runtime. |
| Hard admissibility gating is applied to candidate actions. | Gamma(a;x_t) = 1[Delta_act_tilde(x_t,a) >= 0] |
Reduces unsafe or unsupported action emission. |
| Persistent deficit triggers bounded recovery then containment. | deficit persistence + recovery bound -> containment mode |
Constrains uncontrolled drift under sustained non-viability. |
This window opens the interactive LLM governed by MDL layers in a separate page.
Embodiment Potential-Load Map
This table maps Potential and Load across your core embodiments and additional control-ready domains.
| Embodiment | Potential P | Load L | Source / Note |
|---|---|---|---|
| Battery (voltage-margin basis) | V_rest(t) recoverable voltage support proxy | V_cut + I(t)R_eff(t) required support under load | Paper 1 executed embodiment mapping |
| Star core (pressure-margin basis) | P_star(r,t) outward support pressure | P_req(r,t) gravity-required pressure | Paper 1 physical embodiment |
| Plant metabolism (power-margin basis) | P_met(t) recoverable metabolic power | P_dem(t) maintenance + stress demand | Paper 1 physical embodiment |
| Bridge (governance and physical limit-state forms) | R_B(t) recoverable reserve / resistance | D_B(t) traffic + environment demand | Paper 1 operational plus physical instantiation |
| StARS calibrated channel | P_org = kappa_A(ASL) | L_org = kappa_C(CV) | Paper 2 calibrated commensurate form |
| Grid physical layer | P_grid = GEN + IMP - EXP | L_grid = LOAD (or L_eff under control) | Paper 2 executed simulation |
| Grid structural layer | Operating reserve margin R(t) | Reserve floor r_min | Paper 2 dual-layer admissibility |
| Autonomous drones | Energy remaining E_rem | Energy-to-home dose integral P_req dt | Paper 2 catalog + worked template |
| Spacecraft / satellites | Fuel budget + thermal headroom | Consumption + dissipation dose | Paper 2 catalog embodiment |
| Cyber incident containment | Containment throughput capacity | Spread + alert load and backlog dose | Paper 2 catalog + worked template |
| Cloud SRE governance | Error budget + capacity headroom | Request + fault rate and error accumulation | Paper 2 catalog embodiment |
| Traffic networks | Throughput capacity | Arrival demand + congestion dose | Paper 2 catalog embodiment |
| Reservoir operations | Storage headroom | Demand-inflow imbalance dose | Paper 2 catalog embodiment |
| Manufacturing drift | Process headroom to specification | Drift/noise accumulation and rework burden | Paper 2 catalog + worked template |
| Aviation / airspace flow | Sector capacity + fuel/time margin | Demand rate + weather complexity dose | Paper 2 catalog embodiment |
| Robotics cells | Compute/thermal headroom + safety margin | Task load + perception uncertainty dose | Paper 2 catalog embodiment |
| Data center cluster (additional) | Compute + thermal safety headroom | Workload demand + heat dissipation burden | Additional proposed extension |
| Emergency response network (additional) | Staffed response capacity per hour | Incident arrival pressure + backlog dose | Additional proposed extension |
Ongoing status: validation testing is currently running across computer RAM, CPU, and VPU environments.